Bauweisen und Limitierungen

Das Submodul Allgemeine UAS-Kunde 2 geht auf Bauweisen und Limitierungen von unbemannten Luftfahrzeugen ein. Dabei werden folgende Themenbereiche behandelt:
- Hauptkomponenten,
- Beschränkungen und
- Ausfallsicherheit.
Hauptkomponenten
Unabhängig von der konkreten Konstruktionsweise bestehen unbemannte Luftfahrzeuge aus folgenden Komponenten:
- Dem Antriebssystem,
- einem Drehzahlregler,
- dem Stromverteiler,
- dem Bordcomputer,
- der Firmware,
- der Steuerung,
- der Telemetrie und
- sonstigen Elementen

Das Antriebssystem besteht aus einer Energiequelle (i.d.R. Batterien oder Kraftstoff), Motoren und dem Stromverteiler. Ebenfalls dazu gehören ein Drehzahlregler und die Propeller. Bei den meisten UAS wird die benötigte Energie durch einen Elektromotor bereitgestellt, nur wenige verwenden einen Verbrennungsmotor. Basis für einen Elektromotor sind Permanent- und Elektromagnete in Form von Spulen, die eine Rotationsbewegung durch eine schnelle Änderung des elektrischen Stroms verursachen.
Der Drehzahlregler, auch als ESC (Electronic Speed Controller) bezeichnet, steuert die Geschwindigkeit, mit der sich der Motor und damit auch die Propeller drehen. Die gewünschte Geschwindigkeit wird von der Flugelektronik an den Regler weitergeleitet.
Ein Propeller ist nichts anderes als ein Flügel, der Auftrieb erzeugen kann, wenn er sich in der Luft dreht. Er wandelt die Drehbewegung des Motors in eine Aufwärtsbewegung des Luftfahrzeuges um. Wenn sich der Propeller dreht, drückt er Luft nach unten.
Der Bordcomputer mit dem Autopiloten ist das „Gehirn“ des UAS. Diese Zentraleinheit erfasst und verarbeitet die Informationen aller Sensoren sowie der Steuereingaben und sendet Daten an den Drehzahlregler.
Die Elektronik basiert auf der installierten Software, die regelmäßig vom Hersteller aktualisiert wird. Es ist auch Ihre Pflicht als Fernpilot*in, zu prüfen, ob die Software vom UAS-Betreiber / der UAS-Betreiberin regelmäßig aktualisiert wurde. Viele Hersteller geben vor, dass ein Flug nur mit der neusten Version der Software durchgeführt werden darf. Nach einem Update sollten Sie alle Funktionen während des Fluges immer an einem sicheren Ort testen! Dies gilt ebenso für die Software der Bodenstation, bzw. Steuerung.
Über die Fernsteuerung oder Bodenstation wird das unbemannte Luftfahrzeug vom Boden aus gesteuert. Dabei werden per Funk Anweisungen an die Flugelektronik des UAS gesendet.
Die Telemetrie ist die Funkverbindung zwischen der Steuerung und der Flugelektronik des UAS. Beide Elemente sind jeweils mit einem Sender und einem Empfänger ausgestattet. Über die Telemetrie werden dementsprechend nicht nur Steuersignale zum UAS gesendet, sondern auch Informationen über den Status des UAS zurück zum Boden geschickt: in welcher Höhe befindet sich das UAS? Wie hoch ist die Temperatur des Motors? Wie ist der Batteriestand? Zusätzlich können Sie auch eine Vorschau der Bordkamera erhalten, um das UAS optimal für ein Bild oder Video ausrichten zu können.
Darüber hinaus können eine Reihe sonstiger Elemente wie Navigationslichter, die Kontrolllichter, ein kardanischer Rahmen (Gimbal) für die Kamera, das automatische Fahrwerk und weitere Teile zu den UAS-Komponenten gehören. Je nach Ausstattung gehören auch verschiedene Instrumente und Sensoren dazu. Die Nutzlast (englisch „Payload“) ist ebenfalls ein weiterer Bestandteil und bezeichnet alles, was der Masse des Luftfahrzeuges ansonsten hinzugefügt wird.
Entscheidend ist das Zusammenspiel der verschiedenen Elemente:
Die Eingaben des Fernpiloten / der Fernpilotin in die Fernsteuerung werden per Telemetrie an den Bordcomputer des UAS übertragen. Dieser verarbeitet Informationen verschiedener Sensoren, beispielsweise:
- Die Position via Navigationssystem,
- die Höhe über das Barometer,
- die Lage im Raum über die Neigungssensoren,
- die Ausrichtung des UAS über den Kompass und
- weitere Informationen wie die Motortemperatur.
Basierend auf diesen Informationen führt der Bordcomputer komplexe Berechnungen mit vorprogrammierten Flugparametern und Algorithmen durch und sendet die Daten anschließend an die elektronischen Drehzahlregler. Dieser bezieht seine Energie über den Verteiler, der an die Batterie angeschlossen ist. Auf der anderen Seite steuert der Drehzahlregler die Drehzahlen der einzelnen Motoren und damit auch die Bewegungen des unbemannten Luftfahrzeuges. Wenn das Luftfahrzeug mit einer speziellen Elektronik ausgestattet ist, kann es beispielsweise auch automatisch jemandem am Boden folgen oder eine automatische 360-Grad-Schleife fliegen.
Darüber hinaus können bestimmte Nutzlasten wie eine Kamera über die Telemetrie – also Eingaben der Fernsteuerung – gesteuert werden.
Beschränkungen
Jeder Flug ist gewissen Beschränkungen unterworfen, von denen manche stetig gegeben und andere orts- oder situationsabhängig sind.
Die größte Beschränkung eines unbemannten Luftfahrzeuges ist ihre Flugzeit. Die vom Hersteller angegebene maximale Flugzeit wurde unter optimalen Bedingungen und ohne Berücksichtigung des Windes ermittelt, wodurch sie in der Regel nicht der tatsächlichen maximalen Flugzeit entspricht.
Des Weiteren ist zu beachten, dass Lithium-Polymer (LiPO) Batterien sehr schnell an Leistungsfähigkeit einbüßen, sodass die optimale Flugzeit nur während der ersten Flüge erreicht werden kann. Als eine Faustregel sollten mindestens 20% der angegebenen maximalen Flugzeit abgezogen werden.
Wenn Windböen einen höheren Wert als die Höchstgeschwindigkeit des UAS aufweisen, kann diese unter Umständen nicht zurückgeflogen werden. Beachten Sie, dass die Windgeschwindigkeiten in 100 Metern Höhe viel stärker sein können als in Bodennähe!
Hersteller geben teilweise Entfernungen von beispielsweise 1 km in Bezug auf die Empfangsmöglichkeiten der Fernsteuerung an. In der Praxis muss das UAS jedoch innerhalb Ihres Sichtbereichs bleiben. Außerdem kann der Funkkontakt auch von Signalen von vor Ort befindlichen Mobilfunkmasten oder Türmen beeinträchtigt werden.
Darüber hinaus hat das Wetter einen nicht zu unterschätzenden Einfluss auf jeden Flug. Zunächst ist ein UAS-Flug bei Regen, Schnee oder Hagel nicht zu empfehlen. Neben den physischen Auswirkungen auf das UAS kann die Elektronik beschädigt und die Kommunikation zwischen der Fernsteuerung und dem UAS beeinträchtigt werden. Bei sehr kaltem und feuchtem Wetter können zudem die Propeller vereisen, was höchstwahrscheinlich zum Absturz führt.
Bei heißem Wetter (> 35 ° C) können sich die Motoren wiederum stark erwärmen, wenn sie nicht ausreichend gekühlt werden. Nicht alle unbemannten Luftfahrzeuge verfügen über eine Temperaturmessung an den Motoren und entsprechende Warnroutinen.
Die Temperatur hat auch einen großen Einfluss auf die Kapazität der Batterien. Bei kaltem Wetter ist die Kapazität am stärksten eingeschränkt, weswegen die Batterien an einem warmen Ort wie Taschen oder in einem warmen Auto aufbewahrt werden sollten. Dadurch kann sichergestellt werden, dass diese beim Start eine höhere Temperatur haben.
Neben gesetzlichen Vorgaben und leistungs- oder umweltbedingten Einschränkungen bestehen auch Beschränkungen bei der Ausstattung von unbemannten Luftfahrzeugen.
Ein UAS sollte immer mit größter Sorgfalt behandelt werden, insbesondere bei der Landung. Schwere Stöße können sich auf die Bordsysteme auswirken und dadurch entstandene Schäden sind auf den ersten Blick nicht immer sichtbar.
Die Ermüdung bestimmter Elemente sollte ebenfalls berücksichtigt werden. In diesen Fällen wird der Schaden nicht durch ein bestimmtes Ereignis verursacht, sondern durch mehrere, kleinere Vorfälle, die zusammen den Ausfall eines Bauteils verursachen. Aus diesem Grund ist eine gründliche Überprüfung vor dem ersten Flug des Tages dringend empfohlen.
Propellerschäden treten häufig während des Fluges auf, durch eine Kollision mit anderen Objekten, oder wenn das UAS bei der Landung umkippt. Ein beschädigter Propeller kann sich nicht richtig drehen und verursacht dadurch Vibrationen, die sich wiederum auf die Motoren auswirken. Propellerschäden können schnell zu einem Absturz führen, weswegen Propeller bei Beschädigungen direkt ersetzt werden sollten. Anschließend sollte in jedem Fall ein Testflug abseits jeglicher Risiken durchgeführt werden.
Viele Motoren haben unter theoretischen Bedingungen eine Lebensdauer von etwa 20.000 Stunden. Die praktischen Bedingungen wie das Eindringen von Sand, Staub und Wasser verringert diese allerdings teilweise erheblich. Ob dies der Fall ist, können Sie testen, indem Sie die Propeller vorsichtig von Hand drehen. Wenn Sie einen Widerstand spüren, haben sich wahrscheinlich feine Partikel im Motor abgelegt; die Motoren sollten in diesem Fall genauer überprüft werden.
„Geo“-Systeme
Um zu verhindern, dass unbemannte Luftfahrzeuge in Beschränkungs- Gefahren oder Verbotsgebiete einfliegen, sind UAS mit entsprechenden Systemen ausgestattet.
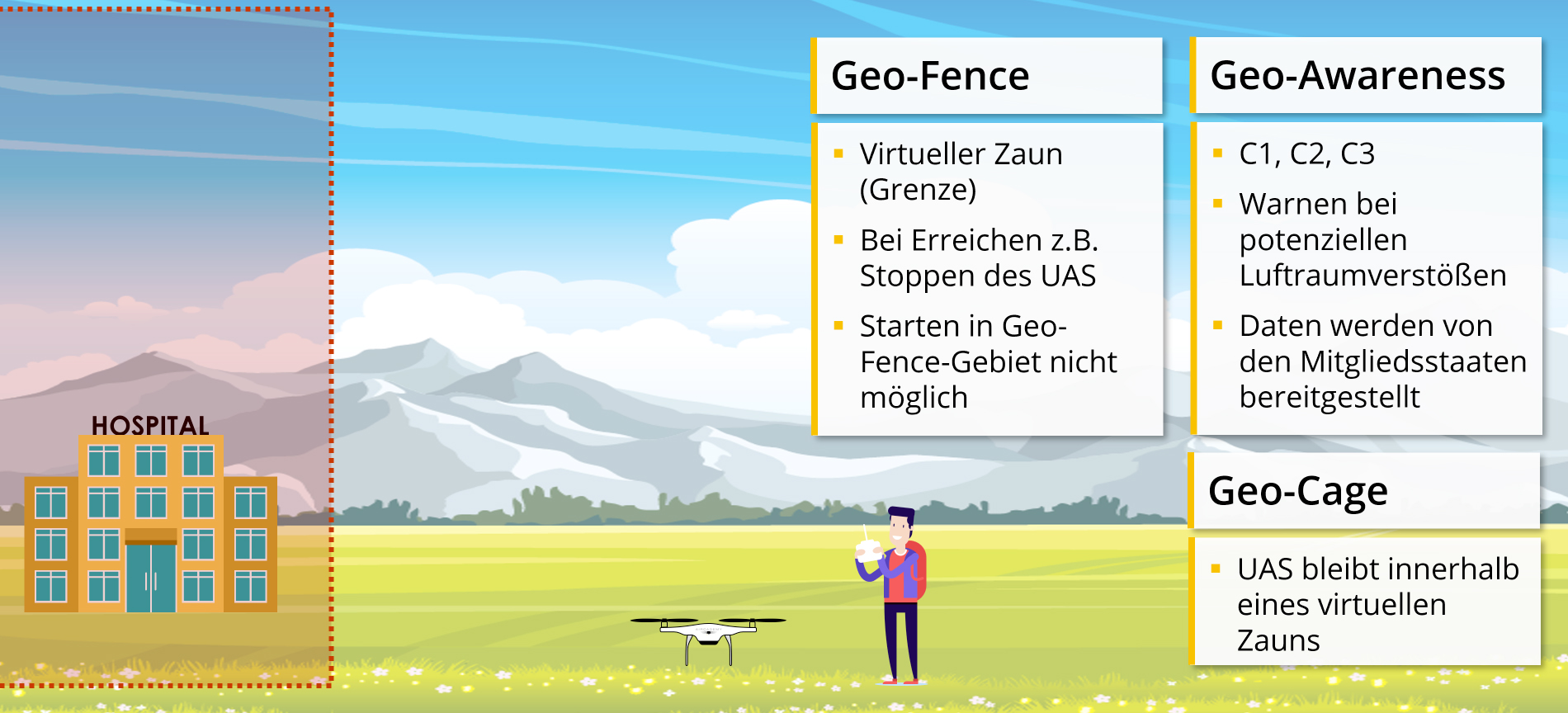
So müssen UAS der Klassen C1, C2 und C3 mit so genannten Geo-Awareness-Systemen ausgestattet sein. Dieses System warnt den Fernpiloten / die Fernpilotin bei potenziellen Luftraumverstößen, sodass diese sofortige Maßnahmen ergreifen können. Die Daten hierfür werden von den Mitgliedsstaaten bereitgestellt und müssen stets auf einem aktuellen Stand gehalten werden.
Viele UAS sind darüber hinaus mit einer zusätzlichen Sicherheitsfunktion ausgestattet, dem so genannten „Geo-Fence“-System. Das Wort ist zusammengesetzt aus den englischen Worten „geographic“, also „geographisch“ und „fence“, also „Zaun “. Der „Geo-Fence“ ist ein virtueller Zaun, also eine Grenze, die anhand von Koordinaten durch den Hersteller oder Fernpilot*innen festgelegt werden kann. Beim Erreichen ober Überfliegen der eingestellten Grenze wird ein vorgegebenes Manöver ausgelöst, das UAS stoppt beispielsweise mitten im Flug. Wenn das UAS innerhalb eines Sperrgebiets abheben soll, startet es erst gar nicht.
„Geo-Caging“ steht für das gegenteilige Konzept: Das UAS startet und bleibt innerhalb eines virtuell abgezäunten Gebietes, aus dem es nicht herausfliegen kann. Der Fernpilot / die Fernpilotin kann auch einen eigenen „Geo-Cage“ festlegen, indem beispielsweise eine maximale Höhe und Entfernung von der Ausgangsposition vorgegeben werden. Dies hätte im Falle eines Kontrollverlustes den Vorteil, dass die Drohne innerhalb des definierten Bereiches bleibt, allerdings nur, wenn das Satellitennavigationssystem noch funktionsfähig ist.
Ausfallsicherheit (fail safe)
Die meisten unbemannten Luftfahrzeuge verfügen über einen oder mehrere so genannte „fail safe“-Modi. Dabei handelt es sich um meist automatisierte Sicherheitsmanöver, um das UAS im Falle eines Problems zurückzuholen. Diese Funktion wird auch „Return to Home“ oder kurz „RTH“ genannt. Voraussetzung für die Nutzung ist, dass die Ausgangsposition des UAS protokolliert wurde und dass zum Zeitpunkt des Ausfalls die aktuelle Position bekannt ist.
Die folgenden RTH-Funktionen können in Abhängigkeit vom UAS beispielsweise ausgeführt werden:
- Failsafe: Wenn das Signal vom Controller über einen vorgegebenen Zeitraum (z.B. 3 Sekunden) nicht empfangen werden kann, fliegt das UAS zurück zur Ausgangsposition. Sobald wieder ein Signal vorhanden ist, kann das Manöver jederzeit abgebrochen werden.
- Smart: Bei diesem Manöver kehrt das UAS ebenfalls zur Ausgangsposition zurück, wenn für einen vorgegebenen Zeitraum kein Signal vom Controller empfangen wird, jedoch ist währenddessen das Kollisionsvermeidungssystem aktiv und vermeidet die Annäherung an alle Hindernisse.
- Niedriger Batteriestand: Wenn der Batteriestand einen kritischen Grenzwert erreicht, sodass die sichere Rückkehr des UAS an die Ausgangsposition in Kürze nicht mehr gewährleistet werden kann, wird dieses Manöver automatisch eingeleitet. Vor der Ausführung des Manövers wird in der Regel eine Warnung auf der Bodenstation angezeigt (z.B. über einen Countdown).

Nach der Aktivierung des RTH-Modus wählt das unbemannte Luftfahrzeug den kürzesten Weg zurück zur Ausgangsposition. Wenn zwischen Ihnen und der Drohne ein Hindernis liegt, wird das in der Regel von dem RTH-Manöver nicht berücksichtigt und es kann zu einer Kollision kommen. Dieses Hindernis könnte sogar der Grund für eine Funkunterbrechung sein.
Eine Kollision mit hohen, am Boden befindlichen Objekten kann wie folgt vermieden werden:
- Die RTH-Höhe muss höher als die von Hindernissen im Einsatzgebiet eingestellt sein. Das UAS steigt dann zuerst auf diese Höhe und kehrt anschließend zur Ausgangsposition zurück.
- Die Kollisionsvermeidung muss zudem aktiviert werden, um Kollisionen mit Objekten auf dem Rückweg zu verhindern.
Wenn Ihr UAS nicht über eine Kollisionsvermeidung verfügt und Sie auch keine sichere Höhe für die RTH-Funktion einstellen können, sollten Sie das unbemannte Luftfahrzeug nicht hinter ein Hindernis fliegen lassen, das sich direkt zwischen dem UAS und der Ausgangsposition befindet.
Content by AIRCADEMY
Grafiken / Fotos:
StockSnap from Pixabay, Natuska/Depositphotos.com, gurZZZa/Depositphotos.com, Zodchiy/Depositphotos.com